AiSchiff
Automation in der Schifffahrt

Wie macht man ein herkömmliches Arbeitsschiff intelligent? In diesem wegweisenden Projekt zeigen wir, wie sensorbasierte Datenerfassung, mathematische Modellierung und smarte Steueralgorithmen zusammenspielen, um komplexe Aufgaben zu ermöglichen.


Warum ist das wichtig?
Die (Teil-)Automatisierung von Schiffen eröffnet völlig neue Möglichkeiten für die Schifffahrt – von effizienteren Abläufen bis hin zu mehr Sicherheit auf dem Wasser. Damit ein Schiff sich eigenständig bewegen und sicher navigieren kann, muss es seine Umgebung genau erfassen, Hindernisse erkennen und darauf reagieren können.
In diesem Projekt werden dafür verschiedene Sensoren am Schiff eingesetzt, z. B. Kameras, Radar oder GPS. Die Daten aus diesen Sensoren werden mithilfe intelligenter Algorithmen miteinander kombiniert („Sensorfusion“), um die exakte Position und den aktuellen Zustand des Schiffes zu bestimmen. Das ist eine wichtige Grundlage für die spätere Planung optimaler Fahrtrouten.
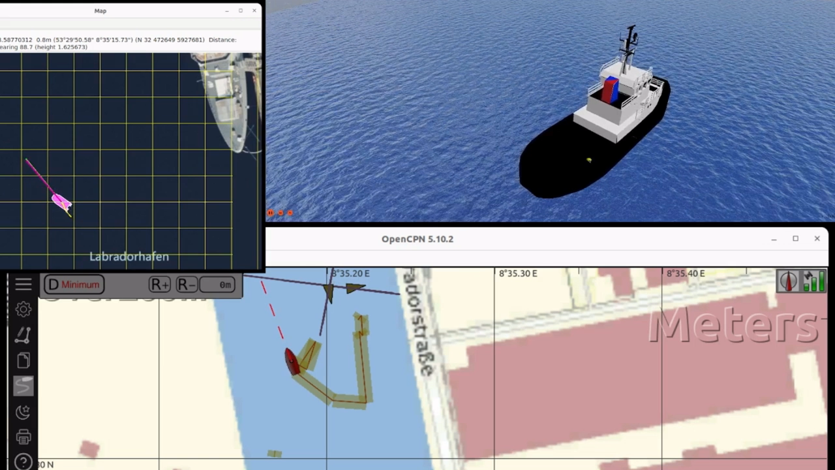
Zusätzlich wird ein mathematisches Modell entwickelt, das das Bewegungsverhalten des Schiffs möglichst realistisch abbildet – und dabei gleichzeitig so schnell berechnet werden kann, dass es sich für den Echtzeiteinsatz eignet. Damit diese Algorithmen sicher und ressourcenschonend getestet werden können, entsteht außerdem eine digitale Simulationsumgebung mit einem sogenannten „Digitalen Zwilling“ – einer virtuellen Nachbildung des Schiffs und seiner Umgebung.
Besonders wichtig ist dabei die enge Zusammenarbeit zwischen Wissenschaft und Industrie: In gemeinsamen Expertengesprächen wird festgelegt, wie die Algorithmen möglichst praxisnah umgesetzt und im späteren Betrieb sinnvoll eingesetzt werden können.
Diese Arbeit legt das Fundament für automatisierte Schiffe der Zukunft – mit dem Ziel, Schifffahrt effizienter, sicherer und umweltfreundlicher zu gestalten.
Die Projektpartner
marinom GmbH
Die marinom übernimmt in diesem Projekt die Rolle des Verbundkoordinators. Sie wurde im Dezember 2020 gegründet. Derzeit beschäftigt sie Physiker, Ingenieure und Softwareentwickler und bearbeitet erfolgreich Kundenprojekte. Die Kernkompetenzen der marinom GmbH basieren auf der langjährigen Erfahrung ihrer Mitarbeitenden in der Projektumsetzung maritimer autonomer Systeme. Ein wesentlicher Erfolgsfaktor ist das tiefgreifende Verständnis der Wechselwirkung zwischen den Fahrzeugen und der eingesetzten Sensorik. Eine der Standardaufgabe der marinom GmbH ist die Integration einzelner Sensoren in ein Gesamtsystem, hierbei werden zur Sensorauswertung immer öfter KI Methoden wie DeepLearning oder Machine Learning eingesetzt. Ein weiterer Fokus der bisherigen Arbeiten lag auf der Überführung von Demonstratoren und Prototypen in den Produktstatus. Hierbei stand immer im Fokus, die Systeme in ihrer Performanz robust und zuverlässig zu machen. Ein wesentlicher Baustein war hier die systematische Abnahme der Systeme in mehreren Stufen entlang der Kundenforderungen.
Im Rahmen des Projektes übernimmt die marinom GmbH außerdem die Sensorikausstattung für autonome Fahrten und die Auswertung der Sensordaten. Konkret umfasst dies die Auswahl geeigneter Sensoren sowie deren Auswertung um Umgebungsinformationen zur Gefahrenerkennung, Kollisionsvermeidung und Trajektorienplanung zu erhalten.
TOPAS Industriemathematik gGmbH
TOPAS ist in diesem Projekt verantwortlich für die (Weiter) Entwicklung von Algorithmen zur Routenplanung von Schiffen. Ziel ist es, dass Schiffe ihre Fahrtroute zukünftig noch besser an die jeweilige Umgebung und Situation anpassen können – zum Beispiel bei der Navigation in engen Fahrwassern oder bei der Vermeidung von Zusammenstößen mit anderen Schiffen.
Dazu müssen auch offizielle Regeln zur Kollisionsvermeidung sowie Informationen aus digitalen Seekarten berücksichtigt werden. Außerdem wird das Verhalten des Schiffs – also wie es sich im Wasser bewegt – in den Rechenmodellen möglichst genau abgebildet. Dafür müssen bestehende Modelle verbessert oder bei Bedarf ganz neu entwickelt und angepasst werden.
Am Ende soll das System in der Lage sein, unter realistischen Bedingungen sichere, effiziente und regelkonforme Fahrtrouten für autonome oder teilautonome Schiffe zu berechnen.
